Industrial Automation
To detect positions of workpieces carried on a conveyor and grip them with a robot hand, three different coordinate systems for the robot, conveyor, and vision must be aligned. With the FH Series, you can easily calibrate the entire system using a step-by-step wizard.
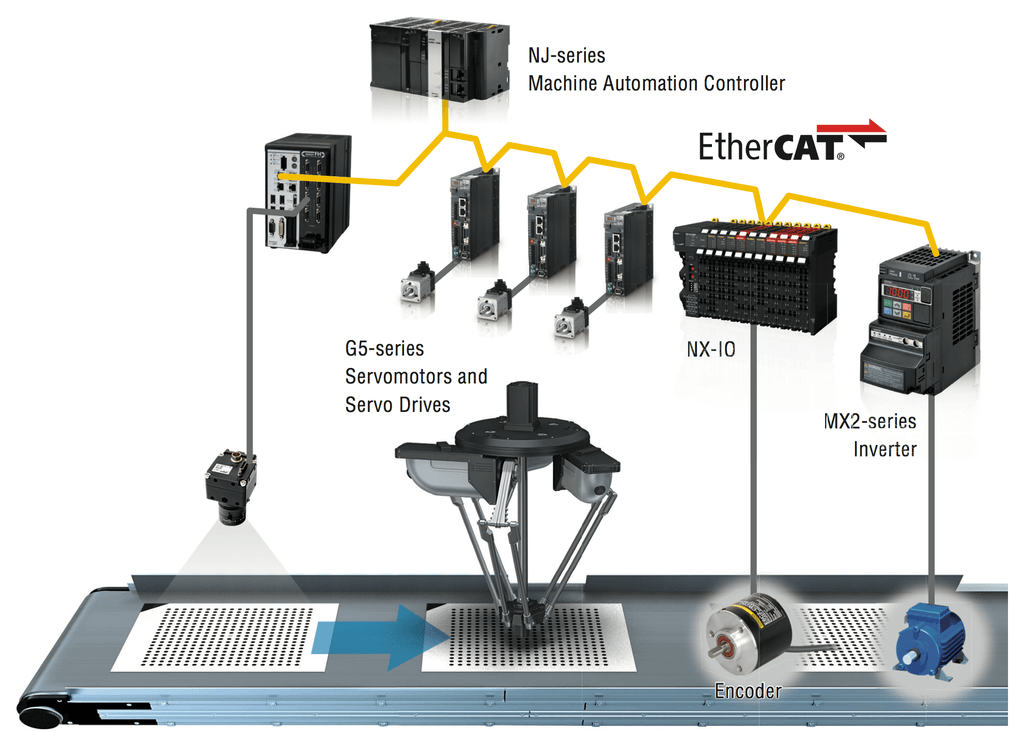
Image Capturing

Step 1
Start the Calibration Wizard from the Sysmac Studio, and capture the image of the Calibration Plate.

Step 2
Move the Calibration Plate into the tracking area, and let the robot touch the target mark to automatically obtain the robot coordinates.
Step 3
The FH Controller automatically calculates by using the data including the conveyor travel distance. Calibration between the robot and FH-series Vision System is completed.
COPYRIGHT 2024 @ OMRON CORPORATION. ALL RIGHTS RESERVED.
| Cookie | Duration | Description |
|---|---|---|
| cookielawinfo-checbox-analytics | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics". |
| cookielawinfo-checbox-functional | 11 months | The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional". |
| cookielawinfo-checbox-others | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other. |
| cookielawinfo-checkbox-necessary | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary". |
| cookielawinfo-checkbox-performance | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance". |
| viewed_cookie_policy | 11 months | The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data. |